Exploration Example 5
Exemple 5: L’exploration d’une zone exploitée
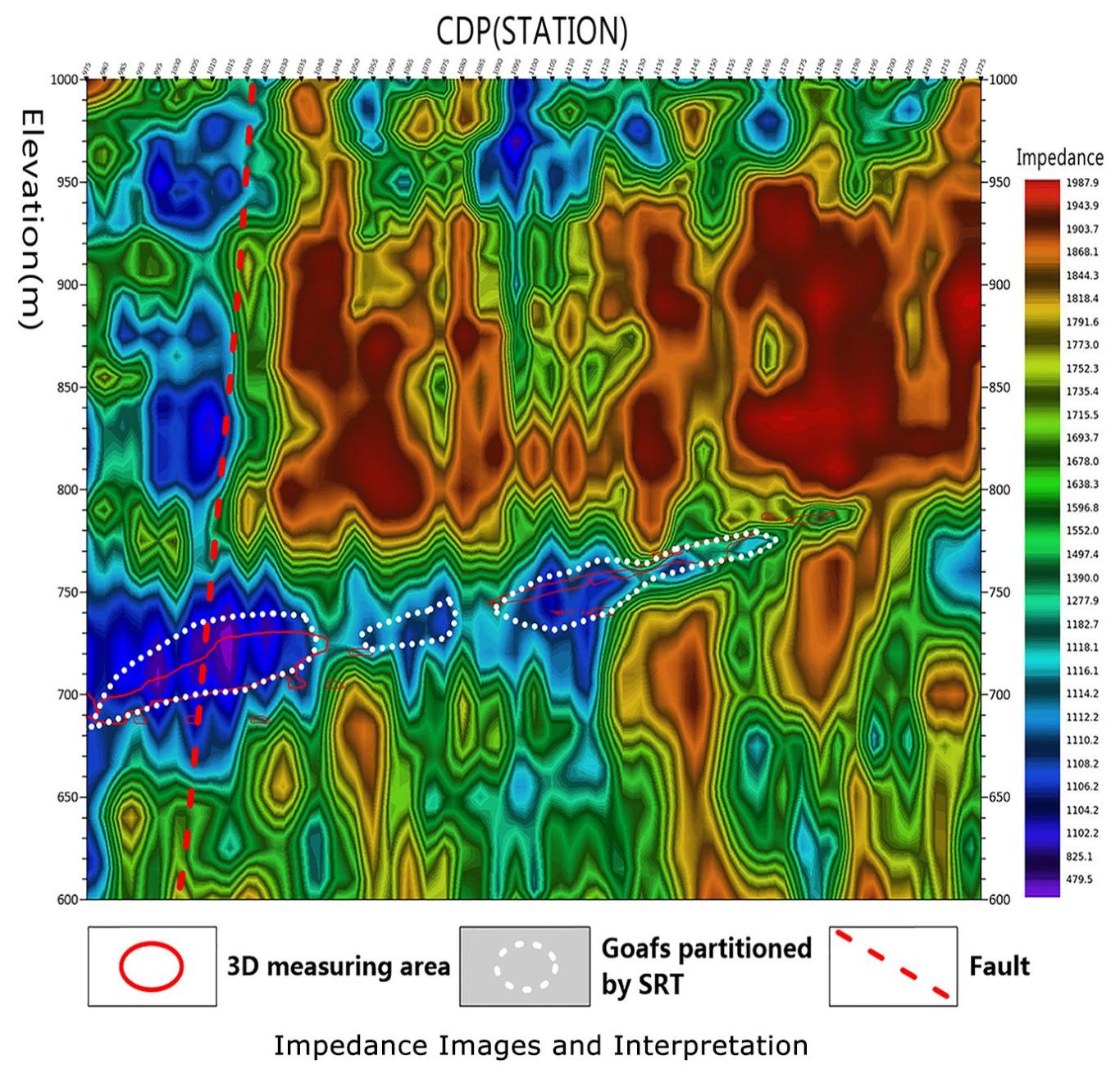
Cette mine de plomb-zinc est située dans la région autonome de Mongolie-Intérieure et, après de nombreuses années d’exploitation minière, il y a de nombreux vides souterrains. Pour déterminer la distribution et la morphologie des vides jusqu’à une profondeur de 400 mètres, deux méthodes ont été utilisées : la MRS et la numérisation laser robotique souterraine en 3D. La ligne solide rouge sur la figure correspond aux résultats de numérisation laser robotique en 3D de la zone exploitée, tandis que la ligne pointillée blanche montre l’emplacement suspecté de la zone exploitée par MRS.
On peut observer que les deux résultats sont cohérents, confirmant que la MRS est très précise pour localiser les zones exploitées.